
y(t)=f(x(t))
y(t)=f(x(t)) |

|
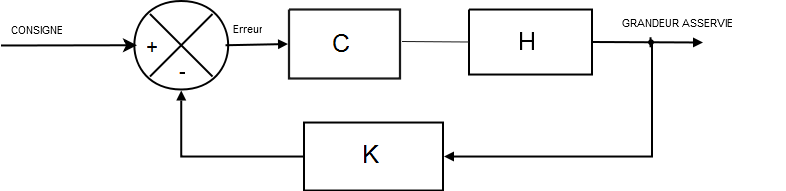
x grandeur de consigne ou d’entrée xer grandeur d’erreur xr grandeur de retour y grandeur de sortie |
H fonction de transfert de la chaîne directe K fonction de transfert de la chaîne de retour HK fonction de transfert en boucle ouverte H / (HK+1) fonction de transfert en boucle fermée |
 En abscisse l'erreur et en ordonnée la commande.
En abscisse l'erreur et en ordonnée la commande.